Вредоносное ПО (malware) - это назойливые или опасные программы,...


Наличие стойла для коров и быков является неотъемлемой частью в содержании КРС. Для того, чтобы его построить нужно придерживаться рекомендованных технологий и правил. Также следует использовать качественные материалы, которые выдержат климатические влияния и напор скота. Правильный коровник обеспечит легкость обслуживания животных и проведения с ними различных ветеринарных процедур, а также добавит продуктивности буренкам. В статье рассказано о том, как сделать стойло самостоятельно на приусадебном хозяйстве.
Размеры стойла для коровы можно посмотреть в таблице и придерживаться этих данных на этапе создания чертежей.
Средняя площадь на одну скотину примерно 6 кв. м., но если с ней теленок, то уже потребуется 10 кв. м. Часто коровники сооружаются с хлевом для телят. Когда нужны отдельные секции, то длина может быть до 260 см, а ширина 125 см. Если же стойла располагаются по обеим сторонам коровника, то проход между ними имеет ширину в 150 см. К высоте нет четких требований, но самая приемлемая – это 250 см.
В частных хозяйствах используют доски или трубы из металла. Иногда стойло выкладывают из кирпича, но в этом случае не получиться изменить его размеры или перенести в другое место. Материалы не должны впитывать влагу. Должно быть наличие подстилки – торф, опилки, солома. Если ферма большая, то используют специальные маты.
Стойло для коровы помогает расположить ее правильно – мордой к кормушке. Подбирая размер, не нужно делать его слишком широким, так как животное может развернуться задом к кормушке, а это приводит к загрязнению еды.
Для КРС можно построить своими руками стойло из металлических труб. Оптимальный их диаметр 60 мм. Для примера, за исходник возьмем хлев, рассчитанный на две коровы, которым требуется два стойла.
Помещение делиться пополам линией и на ней выкапываются три ямки. Одна – возле стены, вторая через 80 см и третья 170 см от стены. У боковых стен выкапываются такие же ямки. В итоге в каждую из них вкапывается исходный материал и заливается бетоном. Получается 9 труб, выходящих из пола. Желательно, чтобы они были одной высоты.
Теперь их нужно закрепить связующими металлическими трубками, при помощи сварки. Сначала они прокладываются горизонтально по верху, потом по низу и привариваются к вертикальным заготовкам. Нужная длина труб подготавливается заранее.
В начале строительства пол обязательно приподнимают над уровнем земли, потому что нужно создать небольшой уклон, примерно 2-3 см. Это позволяет осуществлять сток отходов в жижесборник. Нельзя делать слишком большой наклон, так как это приводит к неприятностям с ногами у скота и абортам у коровы.
Пол лучше всего делать из бетона. Его преимущества в том, что он может выдержать вес взрослой особи, убережет от проникновения грызунов в хлев, не впитывает влагу. Обязательно нужна толстая соломенная подстилка. Еще один вариант – это положенные на бетон деревянные щиты. Их легко убирать для чистки.
В больших фермерских хозяйствах не обойтись без жижесборника. Это может быть специальная емкость, размеры которой зависят от количества коров. Глубину обычно берут не менее 80 см. В стойле, в задней части предусматривается желоб, по которому планируется сток навоза. Будет достаточно 20 см в ширину и 10 см в глубину. При содержании коров на соломенных подстилках, сборник жижи не нужен. Тогда очищение будет стандартным, но придется запастись соломой.
В этом случае крупный рогатый скот всегда находится в стойле на привязи. Устройство, которое фиксирует животных, позволяет им вставать, лежать, кушать, пить. Дискомфорта быть не должно. По типу привязного содержания сооружается стойло для быков, куда обычно помещают и молодых бычков. Это помогает им набирать вес и облегчает обслуживание животных без вреда для здоровья.
Площадь на каждую корову рассчитывается, исходя из установленных требований. Влияют и факторы физиологического состояния животного, а также его габариты. В этом случае места проектируются конкретно для имеющегося поголовья, и ограждения делаются из труб. Такой вариант наиболее удобный, так как при изменении габаритов животного, ширину стойла можно легко подрегулировать.
Для коровы размер стойла в ширину должен доходить до 100 см, при условии, что она имеет средний вес, примерно в 400 кг. Крупным особям будет достаточно 120 см. Сильно габаритный КРС, особенно на 7-9 месяце стельности, требует ширины в 150 см. Обычно за стандарт принимают 120 см, так как это подходит практически всем животным. Большие цифры используются в родильных отсеках. Длина стойла обычно не превышает 260 см. Однако она может быть и 200, и 190 см.
Обычно большая цифра применяется там, где происходят роды у коров. В целом, длину необходимо подбирать так, чтобы навоз сразу попадал в желоб, а не на площадку.
Стойло необходимо для лежания и переваривания пищи. Животные там находятся беспривязно и могут, при необходимости, спокойно передвигаться. В таком варианте размеры несколько увеличиваются. Ширина должна быть 125 см, а длина 280 см. Если место выделено у стены, то тогда оно может доходить в длину до 300 см. Площадь на одну голову — от 8 кв. м.
Денник состоит из секций, которые разделяются с помощью металлических труб. Буренка должна иметь достаточно пространства, чтобы можно было с удобством лечь. Для создания комфортных условий необходимо обеспечить глубокую подстилку. Подойдут прессованная солома или крупные опилки. Если ее не стелить, то коровы могут страдать бронхиальными заболеваниями и проблемами с ногами.
Если статья понравилась и оказалась полезной, ставьте лайк.
Пишите коментарии на тему строительства стойла для КРС.
Лабораторное занятие № 1 "Программирование
микроконтроллера NXT Brick"
Введение
Робототехника - динамично развивающаяся отрасль как с точки зрения прикладного использования так и в научных исследованиях. Появившийся в последние годы новый вид товара - робототехнические комплекты позволяют реализовать проекты роботов с различной функциональностью, провести тестирование задуманного, использоваться в обучении.
Одним из наиболее популярных робототехнических комплектов в мире является LEGO Mindstorms NXT. Разработанный совместно с сотрудниками Масачусетского технологического института он представляет собой большой набор конструктивных деталей (более 600 шт), 3 сервопривода, набор датчиков и микрокомпьютер NXT Brick. Комплект является базовым при проведении многих робототехнических мероприятий в мире, в том числе соревнований WRO (World Robotic Olympiad). С комплектом поставляется среда визуального программирования NXT-G, созданная компанией National Instruments на основе своего продукта LabView.
Таким образом, комплект NXT представляет собой прекрасный полигон для реализации на его основе комплекса лабораторных работ при изучении робототехники.
Цель занятия
Познакомиться с основными возможностями робототехнического микрокомпьютера NXT Brick, его блоками управления, системой меню, познакомиться со средой визуального программирования NXT-G, произвести программирование базовых функций: вывод на экран, воспроизведение звуков.
Задание
Изучить органы управления NXT Brick Изучить систему меню NXT Brick
Изучить назначение портов NXT Brick
Запустить среду программирования NXT-G
Познакомиться с базовой палитрой инструментов NXT-G
Познакомиться с расширенной палитрой инструментов NXT-G Написать следующие программы:
издает одиночный звуковой фрагмент из файла
издает одиночный звук определенной тональности
издает однократно серию звуков из файлов
издает однократно серию звуков различной тональности (программируем мелодию)
издает непрерывно серию звуков различной тональности (блок "Цикл")
выводит на экран изображение из файла
выводит на экран текст в одной строке
выводит на экран текст в трех строках Подготовить отчет со скриншотами написанных программ.
Ход выполнения работы
Внешний вид микрокомпьютера NXT Brick приведен на рис. 1. Питание осуществляется от 6 батарей формата AA. Блок оснащен ЖК дисплеем с возможностью отображения текста и графики. Для перемещения по разделам меню служат клавиши на лицевой панели: оранжевая OK, темно серая - Отмена. Блок может воспроизводить звуки как из заранее записанных файлов, так и различной тональности. Подключение к компьютеру осуществляется по интерфейсу USB. Есть модуль связи Bluetooth, что позволяет как управлять блоком с компьютера, так и связывать блоки друг с другом. NXT Brick имеет три порта для приводов помеченных буквами A, B и C (для движения обычно используются B и C, A - для манипулятора), четыре порта для датчиков, помеченных цифрами.
Рис. 1. NXT Brick
Для программирования NXT Brick может использоваться среда визуального программирования NXT-G. Внешний вид среды со стандартной палитрой инструментов приведен на рис. 2. Здесь программа строится из блоков, размещаемых на балках LEGO. Допустимо использовать циклы, условные переходы, взаимодействовать с датчиками, приводами, управлять приемопередатчиком Bluetooth, осуществлять вывод на экран и воспроизводить звуки.
Рис. 2. Интерфейс визуальной среды программирования NXT-G
Для включения нового блока в программу его необходимо "перетащить" мышкой с панели инструментов на балку LEGO. Порядок следования элементов будет определять порядок выполнения программы.
каждого блока есть набор параметров, которые определяют его "поведение". Так, например у блока "Движение" можно выбрать направление движения, его продолжительность, мощность, подаваемую на двигатели.
Студенты должны выполнить пункты задания на лабораторную работу и поготовить отчет.
Лабораторное занятие № 2 "Основные приемы управления движением мобильного робота"
Цель занятия
Освоить практические навыки построения мобильного робота, освоить практические навыки программирования различных видов движения мобильного робота.
Задание
На основе предложенной схемы собрать конструкцию мобильного робота Написать следующие программы:
Прямолинейное движение вперед на расстояние 1 метр
Движение по "квадрату"
Движение по "окружности"
Движение по "восьмерке"
Ход выполнения работы
Собрать конструкцию мобильного робота. Окончательный вид конструкции представлен на рисунке 3. Эта конструкция - типичная компоновка для мобильных роботов. Два ведущих колеса привода обеспечивают движение, поворотное колесо делает возможным повороты. Поворот робота осуществляется подачей разных мощностей на правый и левый двигатели.

Рис. 3. Тележка мобильного робота с поворотным колесом
При сборке особое внимание необходимо уделить такому понятию как "развесовка". Дело в том, что основную нагрузку в такой тележке должна нести ось ведущий колес. Самым тяжелым элементом конструкции является NXT Brick. Если на поворотное колесо будет приходится слишком большой вес конструкция будет плохо поворачиваться.

Рис. 4. Вид снизу. Способ крепления двигателей
Двигатели в данной тележке крепятся к днищу микрокомпьютера посредством прямых балок (рис. 4).
Особое внимание следует уделить конструкции поворотного колеса (рис. 5). Оно должно свободно поворачиваться как вокруг своей оси, так и вокруг оси крепления. При том конструкция должна быть достаточно прочной. Рис. 5. Конструкция поворотного колеса
После сборки мобильного робота необходимо выполнить все пункты задания и подготовить отчет.

Лабораторное занятие № 3 "Изучение сенсорных датчиков Mindstroms NXT"
Цель занятия
Познакомиться с сенсорами комплекта NXT, освоить способы их подключения, диагностики, освоить практические навыки программирования робота с использованием сенсоров.
Задание
Оснастить робота бампером на основе датчиков касания Написать следующие программы:
Прямолинейное движение вперед до момента столкновения со стеной, после этого отъезд назад, случайный поворот направо или налево, продолжение движения
Дооснастить робота датчиком расстояния Написать следующие программы:
Прамолинейное движение вперед либо до момента столкновения с препятствием, либо когда до препятствия осталось менее 20 см, после этого отъезд назад, случайный поворот направо или налево, продолжение движения
Подготовить отчет со скриншотами написанных программ
Комплект LEGO Mindstorms NXT поставляется со следующим набором датчиков: два датчика касания, ультразвуковой датчик расстояния и цветовой датчик. Все они имеют стандартный вид крепления.

Рис. 6. Датчик касания NXT
Датчик касания NXT фактически представляет собой кнопку. Мы можем отслеживать три состояния: "нажата", "отпущена", "нажата и отпущена". В зависимости от логики работы программы необходимо анализировать одно из этих трех расстояний. С помощью датчика касания можно решать например такие задачи, как детектор столкновений, два датчика могут помочь определить размер объекта и т.д.

Рис. 7. "Заготовка" для бампера

Рис. 8. Бампер
Из кривых балок LEGO соберите собственно сам бампер. Смонтируйте его на мобильном роботе.

Рис. 9. Мобильный робот с бампером
Напишите программу для робота с бампером согласно заданию на лабораторную работу.

Рис. 10. Ультразвуковой датчик расстояния
Датчик расстояния NXT использует ультразвуковой метод определения расстояния до объекта. Имеет излучатель и микрофон. Эффективно работает на расстоянии в пределах от 10 до 100 см до объекта.

Рис. 11. Мобильный робот с бампером и ультразвуковым датчиком расстояния.
Дополните конструкцию робота ультразвуковым датчиком расстояния и напишите программу согласно заданию на лабораторную работу.
По итогам работы необходимо оформить отчет.
Лабораторное занятие № 4 "Движение мобильного робота по черной линии"
Цель занятия
Познакомиться с световым и цветовым сенсором комплекта NXT, освоить базовые алгоритмы движения по черной линии.
Задание
На основе предложенной схемы собрать конструкцию мобильного робота (2 варианта: робот на гусеничной платформе, робот на колесной платформе с поворотным колесом)
Оснастить робота цветовым датчиком Написать следующие программы:
Движение вдоль черной линии используя "классический алгоритм"
Движение вдоль черной линии используя П-регулятор
Движение вдоль черной линии используя ПИ-регулятор
Движение вдоль черной линии используя ПИД-регулятор Подготовить отчет со скриншотами написанных программ
Ход выполнения работы
Для выполнения данной работы понадобится цветовой датчик NXT. Цветовой датчик может работать в двух режимах: датчик цвета и датчик света. Для решения задачи движения по линии больше подходит режим светового датчика. В этом случае значение находится в пределах от 0 до 255 и соответствует яркости отраженного света от освещаемого объекта. Для движения по черной линии целесообразно освещать ее красным светодиодом.

Рис. 12. Цветовой сенсор NXT.
Удалите с мобильного робота датчик расстояния и бампер и оснастите его датчиком освещенности. Расположение сенсора - по осевой линии робота, чуть впереди оси колес.
"Классическая" программа движения робота по черной линии приведена на рис. 13.
Реализуйте ее.

Рис. 13. Простейший "классический" алгоритм движения по черной линии.
Модифицируйте программу для движения по линии с П-регулятором, ПИ-регулятором и ПИД-регулятором.
По окончании работы подготовьте отчет.
Библиографический список
Основы мехатроники: монография / Ю. М. Осипов [и др.] Федеральное агентство по образованию, Томский государственный университет систем управления и радиоэлектроники. - Томск: ТУСУР, 2007. - 162 с.(90 экз. в библиотеке ТУСУР)
Юревич Е. И., Игнатова Е. И. Основные принципы мехатроники. Мехатроника, Автоматизация, Управление, №3, 2006.(5 экз. в библиотеке ТУСУР)
Юревич Е.И. Основы робототехники. Учеб.пособие. – СПб.: БХВ-Петербург, 2005.
М. Шахинпур. Курс робототехники. Пер. с англ. – м.: Мир, 1990.
Мобильный робот перемещается для решения тех или иных задач, получает данные с внешних датчиков, и должен постоянно , чтобы управлять своим движением. Все эти процессы происходят непрерывно и тесно взаимосвязаны друг с другом. Сегодня речь пойдет об основных конфигурациях колесных роботов и том, как математически описываются их перемещения. Этот материал поможет выбрать колесную конфигурацию для своего мобильного робота.
Мобильные роботы могут перемещаться в различных средах: в водной, воздушной, по земле, в космосе. И движение в каждой среде имеет свои особенности, связанные с их различными физическими свойствами.
В этой публикации я рассмотрю колесных роботов, которые способны перемещаться по достаточно плоским поверхностям.
При разработке системы перемещения робота необходимо учитывать следующие моменты:
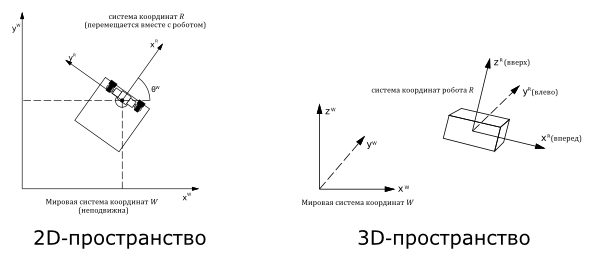
Для того чтобы математически описать движение мобильного робота нам потребуется определить системы координат. Я введу две системы координат — мировую систему координат W (буду считать что он неподвижна в пространстве), и система координат робота R , которая перемещается в пространстве и остается неподвижной относительно самого робота.
Нам необходимо определить местоположение робота, то есть мы хотим знать, как преобразовывать координаты между W и R .
Число степеней свободы определяет минимальное количество независимых переменных (обобщённых координат), необходимых для полного описания движения механической системы.
Твердое тело, которое перемещается и вращается двигаясь по одномерному пути имеет одну степень свободы — поступательную. В качестве примера можно привезти поезд, движущийся по рельсам.
Твердое тело, которое перемещается и вращается на плоскости имеет 3 степени свободы: 2 поступательных и 1 вращательную. Пример: наземный робот.
Твердое тело, которое перемещается и вращается в 3D-объеме имеет 6 степеней свободы: 3 поступательных и 3 вращательных. Пример: летающий робот.

Особый случай — это так называемый голономный робот, который способен перемещаться мгновенно в любом направлении в пространстве его степеней свободы (робот является голономным если число управляемых степеней свободы равно полному числу степеней свободы). Голономные роботы существуют, но требуют множество моторов и необычный конструктив, что зачастую очень непрактично. Однако, наземные голономные роботы могут быть реализованы с использованием всенаправленных колес (omni-wheels).
На видео показан пример четырехколесного робота со всенаправленными колесами.
Существует множество различных конфигураций мобильных роботов.
Есть те, которые применяются реже, например, двухколесная платформа сигвей (segway) с динамическим балансом обладает хорошей высотой при малой площади и достаточно большим ускорением.

Или марсоход Opportunity, который имеет колеса на штангах для преодоления больших препятсвий.

Но чаще применяются другие типы конфигураций.
Это простые, надежные, прочные механизмы, пригодные для роботов, которые в основном передвигаются по плоскости.
Все эти роботы неголономны (используется два двигателя, но три степени свободы движения). Например, не может мгновенно двигаться в сторону.


Такая конфигурация используется в .
Робот с дифференциальным приводом имеет два мотора, по одному на каждое колесо (на рисунке — это большие колеса). Изменение направления движения достигается за счет разных скоростей (отсюда и название — дифференциальный).

Движение по дуге
Обозначим скорости колес (линейные скорости с которыми они «покрывают» поверхность) и - для левого и правого колес, соответственно, и расстояние между колесами.
Для того, чтобы найти радиус криволинейного пути, рассмотрим период движения , в течении которого робот движется вдоль дуги окружности, имеющей угол .

Такой тип роботов имеет два мотора — один для движения, другой для рулежки.

Круговое движение трехколесного робота
При условии, что отсутствует боковая пробуксовка колес, пересечем оси передних и задних колес, чтобы сформировать прямоугольный треугольник, и в результате получим:
Радиус траектории, которую описывают задние колеса:
За время расстояние вдоль этой дуги окружности, пройденное приводными колесами равно , поэтому угол на который повернется робот:

Двигатели постоянного тока, как правило, обладают высокой скоростью вращения и низким крутящим момент, поэтому зубчатая передача практически всегда необходима для управления роботом.

Если Передача 1 имеет крутящий момент , она оказывает тангенциальную силу
на Передачу 2 . Крутящий момент Передачи 2 поэтому

Изменение угловой скорости между Передачей 1 и Передачей 2 вычислим, рассмотрев скорость в точке где они соприкасаются:

Очень часто, робот оценивает свое движение путем мониторинга собственных датчиков. Это может быть, например напряжение электродвигателя и колесные датчики. Эта информация называется одометрией .
Например, на основе очень простой оценки:
Пройденное расстояние пропорционально напряжению и времени. Здесь является расчетной константой (используя знания электричества и геометрии), но также может быть получена в результате калибровки .
Энкодеры дают большую точность измерения числа оборотов колес. Информация с энкодера может быть преобразована в линейное расстояние умножением на постоянный радиус колеса. Но все же, как правило, для большей точности, все равно проводится калибровка.
Если предположить, что робот ограничивается перемещением на плоскости, его местоположение может быть определено вектором состояния , состоящем из трех параметров:
И определяют местоположение предопределенной точки «центра робота» в мировой системе координат.
Определяет угол поворота между системами координат (угол между осями и ).
Две системы координат совпадают в момент, когда центр робота находится в начале координат и .
Получая перемещения робота в некоторые моменты времени, мы можем найти весь путь, пройденный роботом, просуммировав эти значения, или перейдя к пределу (при стремлении количества измерений ) — путем их интегрирования.
При движении на плоскости мы имеем три степени свободы для определения положения, представленные при .
Рассмотрим робота, который может только двигаться вперед или поворачиваться на месте:

При прямолинейном движении робота на расстояние новое состояние будет выражено как:

Если присутствует только вращательное движение, при повороте на угол :


Для случаев и дифференциального и трехколесного роботов мы можем получить выражения для и для случая когда присутствует только движение по дуге окружности.
Одна из ключевых задач мобильной робототехники – это поиск маршрута для движения и его оптимизация. Перемещаясь в рабочей местности, робот должен постоянно оценивать окружающую обстановку, определять свое положение и положение окружающих его объектов. Существует множество различных способов, с помощью которых робот может определять собственное положение и строить маршрут между точками назначения. При перемещениях на улице применяется технология спутниковой навигации, а окружающие объекты обнаруживаются с помощью камер или дальномеров. В случае перемещения внутри помещений с помощью камер и дальномеров строится виртуальная модель пространства, по которой робот ориентируется в дальнейшем. Вышеописанные методы имеют общий характер и применимы в произвольных ситуациях, но из-за этого они очень сложны в реализации и еще не применяются широко в повседневной жизни.

Как правило, автономные робототехнические системы проектируются под конкретные задачи. Такой подход позволяет формализовать требования к системе и разработать все возможные алгоритмы реакции на изменение состояния окружающей обстановки.
Например, одной из достаточно жестко формализованных задач может быть перемещение объектов внутри производственного помещения. Как правило, при перевозке грузов на складах или в производственных цехах роботы преодолевают один и тот же маршрут постоянно. Соответственно данный маршрут заранее известен и для него можно разработать систему управления движением робота.
Ранее цеховые транспортные средства представляли собой тележки, перемещающиеся по рельсам. С ростом науки и техники на смену им пришли робокары – мобильные роботы разных типов и для различных задач, а рельсы, проложенные вдоль цеха, заменила паутина направляющих линий, начерченных на полу.

Мобильные роботы, передвигающиеся в цехах вдоль линии, подобно роботам из предыдущих лабораторных работ оснащаются различными сенсорными устройствами для восприятия окружающей обстановки: ИК-датчиками, камерами, датчиками безопасности и т.п. Но в отличие от рассматриваемых ранее роботов, реальные роботы работают отнюдь не в лабораторных условиях – зачастую направляющая линия может быть повреждена или скрыта за каким-либо объектом, некоторые маршруты могут пересекаться или вовсе прерываться частично.

На реальный маршрут могут накладываться различные ограничения, например: некоторые участки маршрута могут быть запрещены для движения, а некоторые могут быть достигнуты только после проезда через другие.

Становится очевидным, что методы движения вдоль линии, представляющей собой замкнутую траекторию, не совсем приемлемы в подобном случае. С примерами различных алгоритмов движения вдоль линии можно ознакомиться в предыдущих работах, но сразу же можно сделать вывод о том, что ни один из них не учитывает прерывистости траектории движения или наличия на ней пересечений.
Если в процессе движения управляющая программа мобильного робота окажется не в состоянии определить наличие пересечения направляющих линий, это может привести к неоднозначности принятия решения.

При переезде пересечения линий система управления мобильного робота получит данные, свидетельствующие о том, что направляющая линия находится одновременно и справа и слева относительно робота. Соответственно процесс принятия решения о последующих маневрах будет нарушен.


Для того распознавания пересечений направляющих линий может применяться множество различных способов, например в подобных целях достаточно часто применяются камеры. Но обработка изображений требует большой производительности бортового компьютера робота, поэтому такие решения не всегда применимы. В данной работе рассматривается способ управления мобильным роботом с помощью информации, поступающей от массива ИК-датчиков. С помощью массива из семи датчиков S1-S7 становится возможным определить местоположение пересечений линий. Поскольку вариантов наиболее вероятных пересечений достаточно много, следует настраивать управляющую программу робота на максимально возможное количество допустимых вариантов, определенных на основании показаний ИК-датчиков.
В процессе движении вдоль маршрута, представляющего собой пересекающуюся линию, помимо отслеживания линии необходимо осуществлять выбор направления движения на каждом из перекрестков. Прохождение правильной последовательности перекрестков дает возможность проехать заданный маршрут верным образом.

В рамках данной работы предлагается разработать программу следования вдоль заданного маршрута. В качестве примера рассмотрим базовый маршрут, приведенный на рисунке. Чтобы разработать программу для движения вдоль данного маршрута на нем необходимо выделить особые точки, являющиеся пересечениями маршрута или его разрывами. Для того чтобы робот доехал до финиша, он должен следовать вдоль линии и пройти четыре указанные точки.
Движение по заданному маршруту определяется алгоритмической последовательностью, которая задает один из маневров в каждой из ключевых точек. В частности, в приведенном примере на первом пересечении маршрута робот продолжает движение в прямом направлении, на втором поворачивает налево, а на третьем – направо и следует до финишной черты.


Аналогичным образом можно разработать программу движения робота вдоль любого из более сложных маршрутов. Для этого всего лишь необходимо задать последовательность движения робота через пересечения маршрута.
Управляющая программа сводится к поочередному поиску каждой из точек заданной последовательности. Каждая из точек описывается собственной функцией, с помощью которой она распознается, а также скоростью прохождения данного участка, которая определяется на стадии инициализации программы.

Текст программы представляет собой последовательность поочередных вызовов функций, задающих требуемое движение. Для того чтобы варьировать направление движения робота вдоль линии, необходимо всего лишь поменять очередность вызова функций.

Вышеуказанные функции можно разделить на два основных типа:
1) Функции, осуществляющие поворот робота на Т-образных и Г-образных перекрестках.
2) Функции, с помощью которых робот движется до ближайшего перекрестка без каких-либо действий.
В первом случае функция состоит из двух отдельных операций – вызова функции движения вперед и вызова функции поворота в заданном направлении.

Функция l_node_l_turn предназначена для осуществления поворота налево на ближайшем левом пересечении. Функция состоит из двух других функций: l_node_forward отвечающей за движение до ближайшего Г-образного перекрестка с поворотом налево, и pivot_left, за сам отвечающей за поворот налево.

Функция l_node_forward в бесконечном цикле ищет точку пересечения траекторий с помощью функции l_node_detect. Во время поиска робот постоянно следует линии с помощью функции follow_line. После обнаружения точки пересечения маршрутов робот совершает кратковременный рывок вперед, ограниченный временем таймера, для того чтобы слегка сместиться для дальнейшего поворота налево. Данное перемещение крайне важно, для того чтобы после маневра робот оказался по центру направляющей линии. Особое внимание следует уделить процессу распознавания точек пересечения маршрута. Очевидно, что в процессе движения робота по маршруту могут возникнуть различные ситуации, но большинство из них можно описать формальными признаками, например по срабатыванию ИК-датчиков.

Рассмотрим процесс движения робота через участок маршрута с левым поворотом. Очевидно, что в процессе движения робота часть ИК-датчиков попадет на черную линию и возникнет одна из ситуаций, проиллюстрированных ниже.

На рисунке черным цветом отмечены ИК-датчики, расположенные над черной линией, в свою очередь белым цветом – расположенные над белым участком поверхности. В процессе движения робота можно опросить каждый из датчиков и с помощью перебора вариантов определить текущее положение робота.

В приведенной выше функции описывается процесс распознавания левого Г-образного поворота. Согласно приведенному алгоритму под подобной точкой маршрута понимается участок траектории, на котором срабатывают ИК-датчики № 1, № 2, № 3.
Подобным образом можно распознать любой участок маршрута. На первый взгляд это может показаться достаточно простой задачей, но стоит уделять повышенное внимание точности распознавания текущего положения. На точность работы программы могут влиять качество рабочей поверхности, скорость движения робота. Для повышения точности работы программы в функции l_node_detect реализован механизм защиты от ложных срабатываний. Одно и то же условие проверяется дважды после программируемой задержки.

Меры повышения точности работы управляющей программы крайне важны при разработке системы управления. Пренебрежение ими может привести к некорректной работе алгоритма и всей робототехнической системы в целом.
В реальных ситуациях мобильные роботы перемещаются не только по прямолинейным участкам маршрута, но и по криволинейным траекториям, а также выполняют различные маневры.

Чем больше система управления содержит в себе описаний подобных маневров, тем более сложные маршруты может преодолевать робот. Например, на подобии того маршрута, что приведен ниже на рисунке.

В целом программа управления идентична программе, рассматриваемой в предыдущей части. Также как и для любой другой программы задается последовательность прохождения узлов траектории.

По сравнению с предыдущей частью работы добавились два новых типа движений – движение по дуге окружности и движение по диагонали, причем каждое из этих движений различается по направлениям.

Каждая из этих функций состоит из функции следования маршруту - diag_corner_forward, I_curve_branch_forward и функции поворота в требуемом направлении – pivot_left, pivot_right. Контроль за движением робота вдоль линии под углом осуществляется с помощью ИК-датчиков № 1 и № 7, которые задают положение робота над линией. Если же робот оказывается над линией, то запускается функция follow_line, с помощью которой робот отслеживает собственное положение относительно линии и центрируется на ней с помощью ИК-датчика № 4.

Следование линии нацелено в первую очередь на движение вдоль нее с ориентацией центра робота над линией. Поскольку центр робота совпадает с ИК-датчиком № 4, функция follow_line стремится минимизировать отклонения ИК-датчиков № 3 и № 5 относительно линии.

Суть данного процесса сводится к выполнению ряда условий:
1) Если ИК-датчик № 4 находится над линией, то робот едет прямолинейно с максимальной скоростью.
2) Если один из ИК-датчиков № 3 или № 5 обнаружил линию, то робот поворачивается в противоположном направлении с минимальной скоростью.
Во время следования линии изменяется, в зависимости от положения робота, скорость его маневрирования. Это сделано из-за того, что в некоторых ситуациях необходимы плавные движения робота, чтобы он не съехал с линии, например при маневрировании между датчиками № 3 и № 5.
В случае же если робот отклонился от линии достаточно сильно, необходимо скорректировать его положение максимально быстро, поэтому скорость его движения увеличивается.
За изменение скорости движения робота отвечает функция change_speed, которая задает скорость вращения приводов в процентном соотношении от значения максимальной скорости.

Помните, что соблюдение скоростного режима – одно из важнейших условий, влияющих на движение робота по заданному маршруту. Одно из важнейших требований к алгоритму управления мобильным роботом – соблюдение оптимальной скорости для данного участка маршрута.

Соблюдение скоростного режима – это не просто требование безопасности движения, это в первую очередь требование, позволяющее минимизировать ошибки работы управляющей программы робота. Стоит помнить, что скорость движения робота существенным образом влияет на качество распознавания узловых точек маршрута и ориентацию самого робота относительно направляющей линии.
Основная цель разработчика робототехнических систем – это обеспечение качественной и безотказной работы в процессе функционирования. Ради этого можно пожертвовать многим – производительностью, ресурсоемкостью и т.п., в том числе и быстродействием.
Данная лабораторная работа наиболее важная среди работ, рассмотренных ранее. Это обусловлено не только сложностью преподносимого материала, но и затронутыми важными проблемами, такими как обеспечение точности и качества работы робототехнических систем.

Цель данной работы продемонстрировать, что не только внешние факторы влияют на качество работы того или иного робота. Существенное влияние на процесс выполнения поставленной задачи может оказывать сам робот, функционирующий на основании программы управления.
Рассмотренные в обеих частях программы наглядно демонстрируют влияние скорости движения на качество прохождения заданной траектории. Для закрепления результатов работы можно исследовать движение робота по приведенному ниже маршруту, сочетающему в себе все возможные маневры, рассмотренные ранее.

Помимо сложности маршрута и скорости движения на функционирование робота существенное влияние оказывает качество поверхности, по которой осуществляется движение. Вполне возможна ситуация, что линия, вдоль которой должен передвигаться робот, может оказаться поврежденной или даже закрашенной.

Разработчик робототехнической системы должен предусмотреть все возможные варианты применения своего проектного решения. Чем больше всевозможных влияющих факторов будет учтено на стадии проектирования, тем точнее и качественнее будет функционировать робот.
Вредоносное ПО (malware) - это назойливые или опасные программы,...

Лучшие программы для восстановления данных с любых носителей информации....

Здравствуйте.Одна из самых распространенных причин, по которым тормозит...